In diesem Projekt ging es darum ein ferngesteuertes Auto zu bauen.
Das hatte ich mir eigentlich nicht als eine so große Aufgabe vorgestellt… Also packen wir noch was oben drauf:
Es soll ein großes Auto werden (check)
Es soll 6wd fahren
Es soll Treppen steigen.
Es soll autonom fahren können.
Puh – Das sind ja gleich gefühlt 3Mio Sachen auf einmal.
Ein Mars Rover, inspiriert durch diese Dillettanten von der NASA, sollte es machen. Hey Marc! – Baust Du mir mal schnell einen Marsrover?
Nun ist er fertig und wartet bereits auf seine 4ten Ersatzmotoren, weil der Fahrer das Teil jedesmal (aus Liebe zum Detail) irgendwie zersägt. Alle Gelenke und eigendlich alles bis auf die Elektronik und (noch) die Räder kommen aus dem eigenen 3D Drucker.
Mars Rover Drucken ist aber nicht gerade leicht. Viele Teile, hohe Anforderungen an die Qualität und auch große Teile (lange Druckzeiten)
Naja, Rom wurde auch nicht an einem Tag gebaut.
Als Gehirn habe ich einen APM Flugcontroller bemüht um das Steering auf Tracks über einen Differentialantrieb umzusetzen.
Zu Deutsch: Der Roverbau ist doch nicht so trivial… 6 Motoren, über 2 Tracks (Seiten) ohne Lenkgetriebe. Das KFZ lenkt, indem die Geschwindigkeiten beider Spuren unterschiedlich regelt. Links schneller als Rechts, Rover fährt eine Rechtskurve und umgekehrt. Und das soll auch noch autonom können?
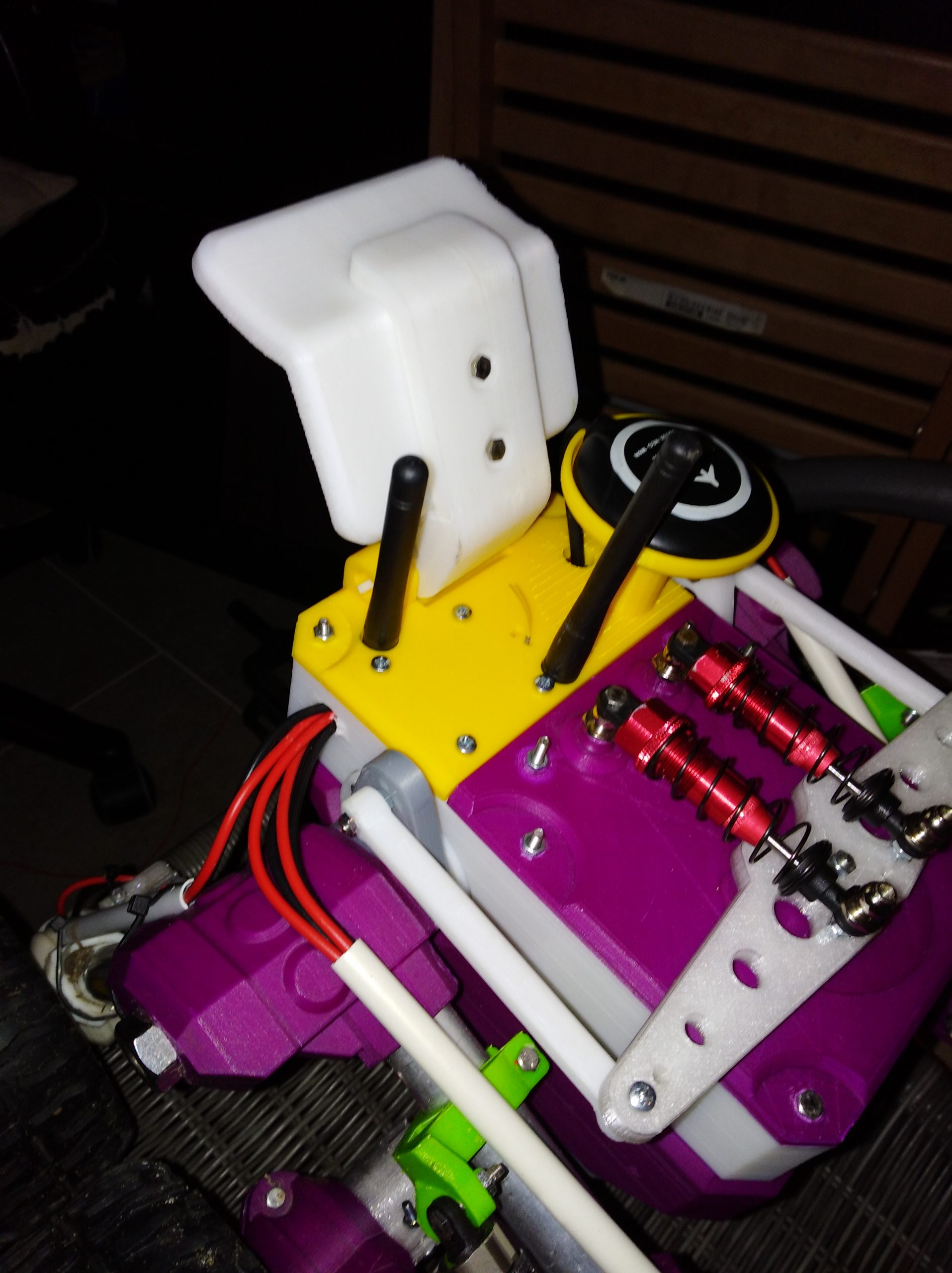
Im Beitragsbild in gelb zu bewundern ist ein von mir modifiziertes Bauteil für den Rover. Ich habe es gleich in gelb gedruckt, damit es so schön auffällt. Es bietet oben platz für einen GPS-teller (NeoM8N) sowie 3 Durgänge für Antennen, welche auf der Unterseite meines gelben Schmucktückes gebraucht werden für:
RunCam Mainboard
433MhZ APM Mavlink Modul
und TBS Videosender auf 5800MHz
GPS Navigation und Positionsbestimmung funktionieren super, sobald man dem Gerät gesagt hat, in welche Richtung es schaut, kann es Dir merkwürdigerweise sagen, wo es sich befindet… Magie… ne GPS… oder etwa doch nicht so einfach.
Leider sind die China-Getriebe auf den DC Motoren murks und werden vom Rover durch verschiedenste Krafteinwirkung immer wieder zermahlen.
Somit ists wie es ist. Eine (weitere) Dauerbaustelle. ;(
Wir warten auf ein Set neuer Motoren und rüsten Ihn derweil mit dem weiteren Schnick Schnack aus.
FPV Fahren und fahren lassen…
Nach diversen Exkursen zum Thema Positionsbestimmung und ArduPilot konnte ich den Rover dazu bringen, automom einen zuvor gelernten Kurs zu fahren. Auch die autonome Fahrt über einen zuvor über googlemaps bestimmten Kurs wäre möglich, aber alles andere als sicher. Das Fahrzeug benötigt hierzu soch Sensoren, die mehr Aufschluss über hindernisse geben. Ein Sonar zb. Mit arduino und einem Ultraschallsensor bewaffnet, laufen die Tests bereits 😉