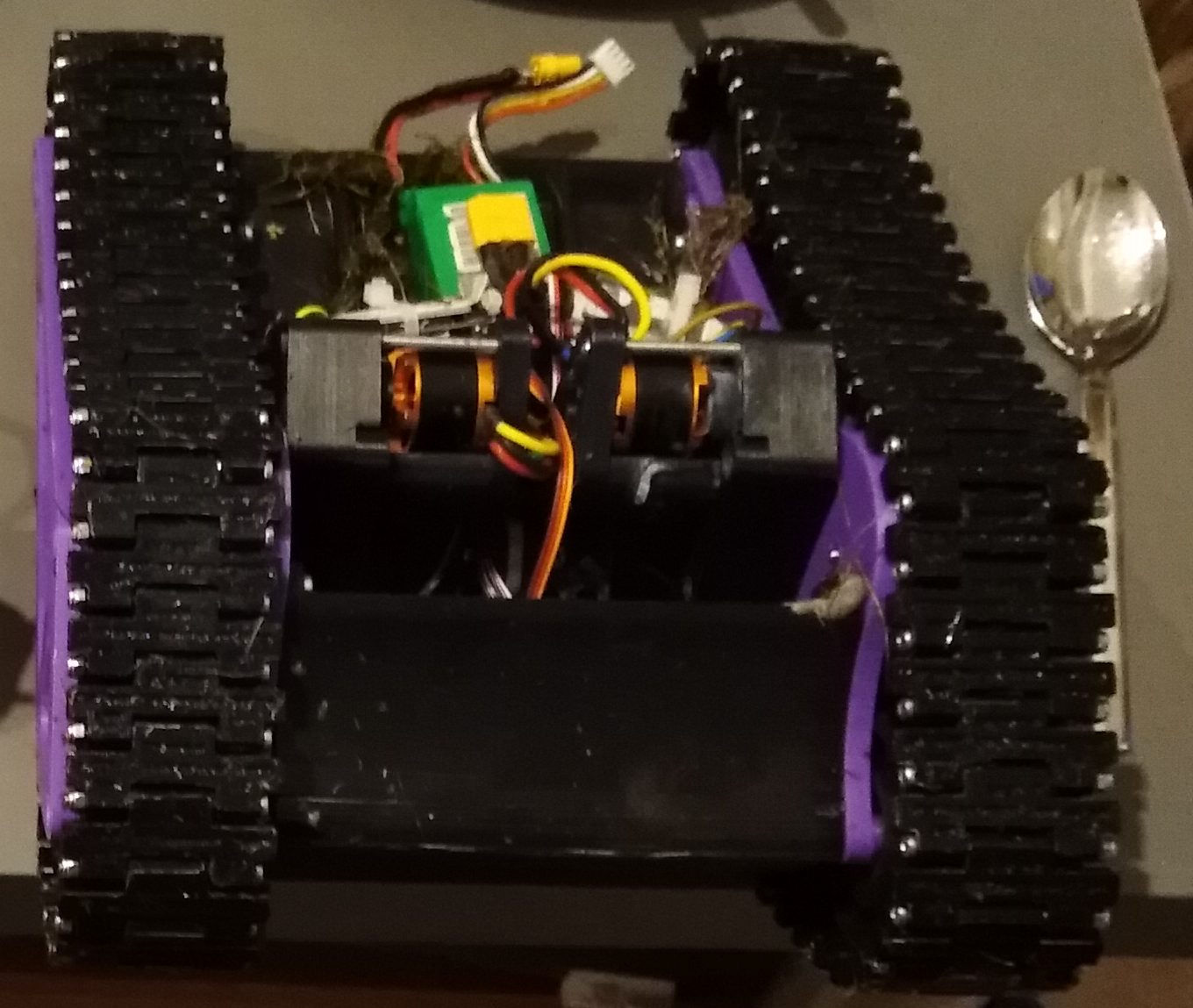
Harte Zeiten erfordern harte Maßnahmen. Der Rover war schon ganz nett und hat viel Spaß gemacht. Nur leider ist er zu langsam. Deswegen habe ich einen Panzer gedruckt. Ein wenig die Schulbank drücken musste ich natürlich auch in diesem Projekt, ganz ohne Schmerzen geht es nie.
Hatte bei der Durchsicht der technischen Unterlagen versäumt, mir die Größe anzuschauen und war nachher sehr überrascht, als ich fertig war. Ich nenne ihn Wiesel. Der Druck aller Teile dauert weit mehr als 100Std und somit ist Wiesel mein bisher umfangreichstes Druckprojekt.
Angetrieben wird der Panzer mit 2 bürstenlosen Motoren, die über je ein eigenes (selbstgedrucktes) Getriebe pro Seite Kraft auf die Ketten Bringen. Ein einfacher V-Tailmixer zwischen Reciever und ESC mischt Gaswert und Lenkwert zu gleichen Teilen und macht so ein sauberes Steuern möglich.
Panzerteile, ein aufgeräumter Schreibtisch
Wiesel ist ein echter Spaßgarant, und toll ist’s auch zu sehen wie er sich auf geteerten glatten Untergründen wie ein tänzelnder Derwisch aufführt. Klasse! Ich werde den Beitrag zu geg.ebener Zeit noch mit Videos füttern, aber was wäre ein Panzerpilot ohne Helm? *spoil*
Mein Sohn ist begeistert, und ich auch. der Sound zu diesem Projekt kommt vom Kammermusikensemble JBO und heisst Panzerdance. Viel Spaß beim googlen.
Walter Moers Comic (das kleine Arschloch) hat mich zu einem Quadkopter-Selbstbau gebracht. Dieser sollte hauptsächlich dazu dienen meine Kenntnisse über Flugcontroller zu erweitern. Für den Rover haben wir ja schon mal den APM genutzt. In anderen Projekten durfte ich den Pixhawk kennenlernen, aber um es richtig krachen zu lassen, habe ich mir einen F4 FC und eine dazugehörige 4in1 ESC Platine besorgt. Das Kamerasystem kommt natürlich von Runcam und die VTX von TBS (TeamBlackSheep). Meine Funke ist closed source (Radiolink AT10) und Lipos fliege ich hauptsächlich 4S mit 1500 mAh. Das reicht für ca. 5 Min Flugzeit, wenn man sich an die Verkehrsregeln hält. Wer den Gashebel voll ausspielt, landet irgendwo bei 3-5 Min Flugzeit. Bewaffnet mit 5Zoll Luftschrauben ist Peppi wohl schon an jedem Zaun abgeprallt, den unser Umfeld hier zu bieten hat.
… PEPPI PEPPI PEPPI, was hast Du nur schon wieder angestellt 😉
Geflogen wird mit Betaflight in seiner neuesten Version. Krass, wie sich dieser Softwareschnipsel in den letzten zwei Jahren weiterentwickelt hat. Unsereins musste noch analoge Signale
aus dem Reciever verarbeiten, heute gibt’s SBUS. Auch LEDs kann man nie genug haben, besonders dann, wenn man mit Brille fliegt, ist das zu empfehlen. Naja. Betaflight bietet nicht nur supereinfache Möglichkeiten zur Konfiguration vieler LEDs an, sondern hat auch gleich eine Superlösung zur Konfiguration des OSD über dem Videobild.
Die Motoren kommen natürlich, wie bei jeder anständigen Rennsemmel, aus Shenzen.
Der Hersteller dieser 2306 Monster heisst AOK FLY, das Modell RC-Vector.
Sie bringen präzisen Schub und sind nicht ganz so ungenau verarbeitet, was sich beim drehen der Luftschrauben mit der Hand deutlich bemerkbar macht. Stinknormale 5045 Props in grün kommen drauf und gut. Als Frame habe ich vorerst mehrere 3d-gedruckte Ramenteile verwendet. Diese haben aber für mich einen entscheidenden Nachteil: Jedesmal, wenn Peppi mal wieder ungewollt mit einem Zaun Bekanntschaft macht, braucht es einen neuen Peppi… Interessant war zu beobachten, wie dynamisch sich ein 3d-Druck Rahmen um einen Zaun herumwickeln kann.
White Smoke… Deck 0 geriet in Flammen und riss einen Motor mit sich. -> Seit dem spar ich mir die ganze Platine und löte mir mit Hlfe des noch intakten ELKOS und 2 Spannungsregelern 12v und 5v mein eigenes PDB.
Eins ist sicher: Peppi musste nie lange leiden, dafür aber oft und immer wieder. Nachdem einigermaßen klar war, wohin es mit meinen Flugkünsten geht, bin uch auf einen 4mm carbonrahmen in 210mm von Motor zu Motor umgestiegen.
Der Frame verzeiht einiges mehr, sehr zum leidwesen der an Bord befindlichen Elektronik.
Ein gedruckter ABS Frame bricht und kompensiert damit einen Großteil der Aufprallenergie. Ein Carbonframe in 4mm, womöglich noch aus einem Stück, federt und bringt seine Innereien dabei in Lebensgefahr. Gerissene Standoffs und auch ganze Platinen waren bei mir die Folge.
Hier ein paar lose Tips zum Eigenbau:
Jedes Gramm zählt, auf Platinen nicht zu heiss löten, Kabel kurz halten, Spannung+Ground von CAM und VTX über LC-Filter und LOW ESR ELKO führen, (wird fortlaufend erweitert)
inspiriert durch meinen Arbeitgeber eine 4″ Version von PEPPI. Die ersten 4 grünen Motoren sind schon kaputt… daher nun die kleineren 1806 von DYS
Auch wenn der Copter später nicht an Rennen teilnehmen soll, schadet Leistung nicht. 2306er Motoren bilden meiner Meinung nach hier das optimale Gleichgewicht zwischen Gewicht und Leistung. Ein gedruckter Frame in einem Stück ist super, denn man kann gleich 3 oder 4 davon mitnehmen und überlebt auch mal einen unsanften sturz. Gerade in den Anfangszeiten spart dies eine Menge Geld. Meine Erfahrung sagt hier, dass nach heftigen Bruchlandungen unterm Strich bei gedruckten Frames deutlich weniger Werte zu ersetzen waren, weil die Elektronik meist den Absturz überlebt hat. Wenn ich heute bruch lande ist zu 90% schon vor dem Aufplall etwas kaputt gegangen.
In diesem Projekt ging es darum ein ferngesteuertes Auto zu bauen.
Das hatte ich mir eigentlich nicht als eine so große Aufgabe vorgestellt… Also packen wir noch was oben drauf:
Es soll ein großes Auto werden (check)
Es soll 6wd fahren
Es soll Treppen steigen.
Es soll autonom fahren können.
Puh – Das sind ja gleich gefühlt 3Mio Sachen auf einmal.
Ein Mars Rover, inspiriert durch diese Dillettanten von der NASA, sollte es machen. Hey Marc! – Baust Du mir mal schnell einen Marsrover?
Nun ist er fertig und wartet bereits auf seine 4ten Ersatzmotoren, weil der Fahrer das Teil jedesmal (aus Liebe zum Detail) irgendwie zersägt. Alle Gelenke und eigendlich alles bis auf die Elektronik und (noch) die Räder kommen aus dem eigenen 3D Drucker.
Mars Rover Drucken ist aber nicht gerade leicht. Viele Teile, hohe Anforderungen an die Qualität und auch große Teile (lange Druckzeiten)
Naja, Rom wurde auch nicht an einem Tag gebaut.
Als Gehirn habe ich einen APM Flugcontroller bemüht um das Steering auf Tracks über einen Differentialantrieb umzusetzen.
Zu Deutsch: Der Roverbau ist doch nicht so trivial… 6 Motoren, über 2 Tracks (Seiten) ohne Lenkgetriebe. Das KFZ lenkt, indem die Geschwindigkeiten beider Spuren unterschiedlich regelt. Links schneller als Rechts, Rover fährt eine Rechtskurve und umgekehrt. Und das soll auch noch autonom können?
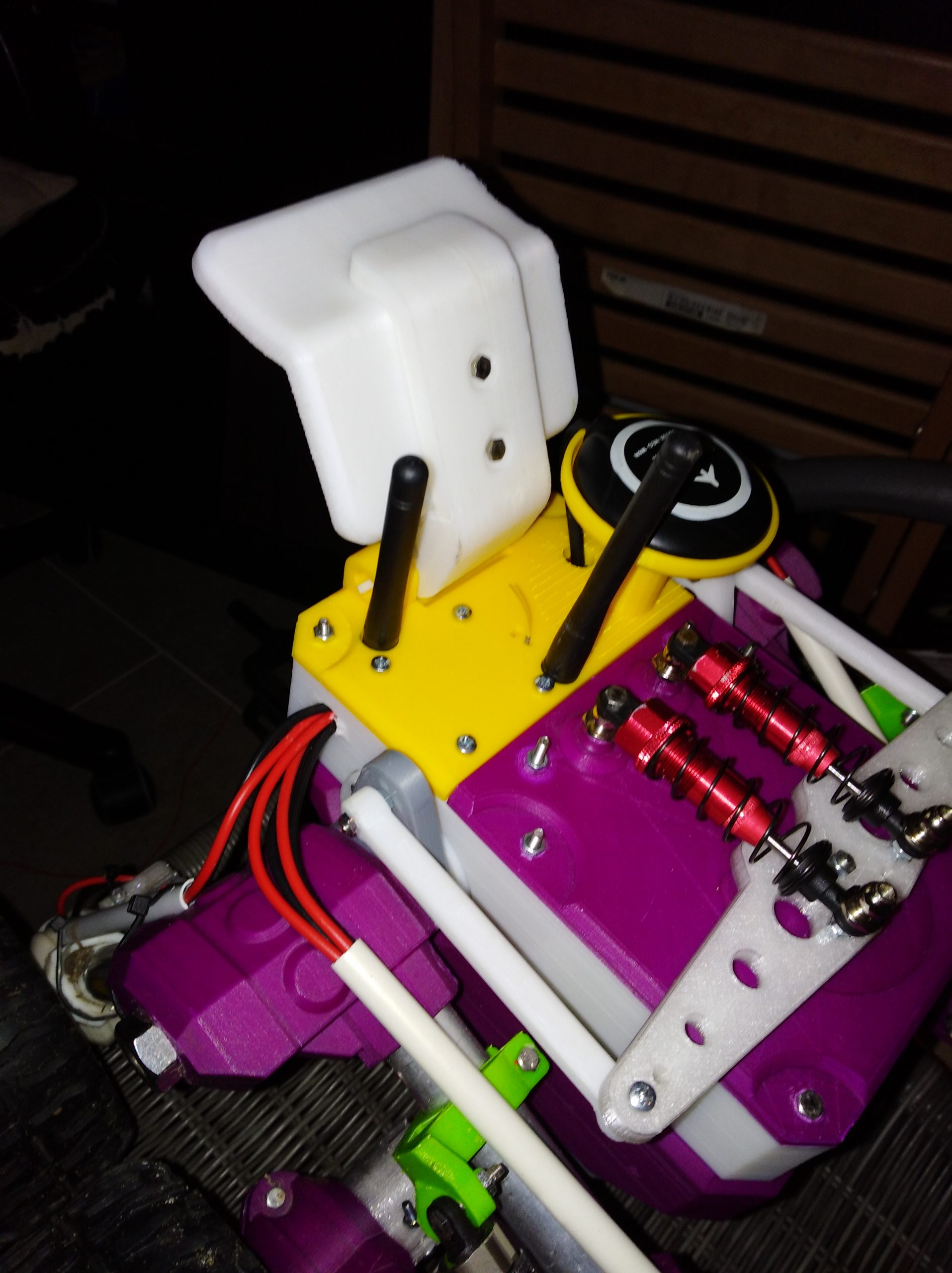
Im Beitragsbild in gelb zu bewundern ist ein von mir modifiziertes Bauteil für den Rover. Ich habe es gleich in gelb gedruckt, damit es so schön auffällt. Es bietet oben platz für einen GPS-teller (NeoM8N) sowie 3 Durgänge für Antennen, welche auf der Unterseite meines gelben Schmucktückes gebraucht werden für:
RunCam Mainboard
433MhZ APM Mavlink Modul
und TBS Videosender auf 5800MHz
GPS Navigation und Positionsbestimmung funktionieren super, sobald man dem Gerät gesagt hat, in welche Richtung es schaut, kann es Dir merkwürdigerweise sagen, wo es sich befindet… Magie… ne GPS… oder etwa doch nicht so einfach.
Leider sind die China-Getriebe auf den DC Motoren murks und werden vom Rover durch verschiedenste Krafteinwirkung immer wieder zermahlen.
Somit ists wie es ist. Eine (weitere) Dauerbaustelle. ;(
Wir warten auf ein Set neuer Motoren und rüsten Ihn derweil mit dem weiteren Schnick Schnack aus.
FPV Fahren und fahren lassen…
Nach diversen Exkursen zum Thema Positionsbestimmung und ArduPilot konnte ich den Rover dazu bringen, automom einen zuvor gelernten Kurs zu fahren. Auch die autonome Fahrt über einen zuvor über googlemaps bestimmten Kurs wäre möglich, aber alles andere als sicher. Das Fahrzeug benötigt hierzu soch Sensoren, die mehr Aufschluss über hindernisse geben. Ein Sonar zb. Mit arduino und einem Ultraschallsensor bewaffnet, laufen die Tests bereits 😉